📖 Dynamic Programming#
⏱ | words
What is dynamic programming?#
“DP is recursive method for solving sequential decision problems”
📖 Rust 2006, New Palgrave Dictionary of Economics
In computer science the meaning of the term is broader: DP is a general algorithm design technique for solving problems with overlapping sub-problems.
Dynamic programming in economics#
DP provides a framework to study decision making over time and under uncertainty and can accommodate learning, strategic interactions between agents (game theory) and market interactions (equilibrium theory)
Many important problems and economic models are analyzed and solved using dynamic programming:
Dynamic models of labor supply
Job search
Human capital accumulation
Health process, insurance and long term care
Consumption/savings choices
Durable consumption
Growth models
Heterogeneous agents models
Overlapping generation models
Dynamic discrete choice (DDC)#
Extend the discrete choice framework to repeated discrete choice over time
Given state \(s_t \in S\) an agent takes a decision \(d_t \in D(s)\) that determines current utility \(u_t(s_t,d_t)\) as well as the future states of the world.
The agent forms (subjective) beliefs about the uncertain next period’s state \(s_{t+1}\) that evolve according to a Markov transition probability \(p(s_{t+1}|s_t, d_t)\).
The agent’s problem is to choose a optimal decision rule \(\mathbf{\delta} = \{\delta_0,...,\delta_T\}\), where \(d_t=\delta_t(s_t)\), that solves
where \(\mathbb{E}_{\delta}\) denotes expectation with respect to the controlled stochastic process \(\{s_t,d_t\}\) induced by the decision rule \(\delta\).
The difficulty is that we are looking for a set of functions \(\mathbf{\delta} = \{\delta_0,...,\delta_T\}\), not just for a set of numbers \(\mathbf{d} = \{d_0,...,d_T\}\)
DP simplifies the DDC problem, allowing us to find \(\mathbf{\delta} = \{\delta_0,...,\delta_T\}\) using a recursive procedure.
Bellman’s Principle of Optimality#
An optimal policy has a property that whatever the initial state and initial decision are, the remaining decisions must constitute an optimal policy with regard to the state resulting from the first decision.
📖 Bellman, 1957 “Dynamic Programming”
Breaking the problem into sequence of small problems#
Thus, the sequential decision problem is broken into initial decision problem and the future decisions problem
The solution can be computed through backward induction, i.e. solving a sequential decision problem from the later periods
Embodiment of the recursive way of modeling sequential decisions is Bellman equation
Bellman equation#
Definition
Bellman equation is the complete recursive description of the dynamic optimization problem in discrete time:
State variables — vector of variables that describe all relevant information about the modeled decision process, \(x_t\)
Decision variables — vector of variables describing the choices, \(d_t\)
Instantaneous payoff — utility function, \(u(x_t,d_t)\), with time separable discounted utility
(next state) is the stochastic next period state resulting from current state and decision
expectation \(\mathbb{E}\{\cdot\}\) is taken over the distribution of the next period state conditional on current state and decision
Motion rules — agent’s beliefs of how state variable evolve through time, conditional on choices, \(x_{t+1} \sim F(x_t,d_t)\)
\(\beta\) is a discount factor to measure future rewards in terms of current ones
Solution is given by:
Value function — maximum attainable utility \(V(x_t)\)
Policy function — mapping from state space to action space that returns the optimal choice, \(d^{\star}(x_t)\)
The optimal choices are revealed along the solution of the Bellman equation as decisions which solve the maximization problem in the right hand side (\(\arg\max\) of the maximization in the Bellman equation)
Classification of DP models#
Discrete or continuous time?
Finite or infinite horizon?
Choice space (discrete, continuous, mixed)?
State space (finite, discretized)?
Stochastic or deterministic evolution of states?
Whether choice is part of the problem at all#
Computer science uses DP to solve problems without explicit decisions, but breaking big problems into a series of small ones lecture 27 in CompEcon course
Examples of sequential discrete/discretized choice
deal or no deal problem lecture 27 in CompEcon course
inventory management model (see below)
Rust model of bus engine replacement lecture 28, 29 in CompEcon course
cake eating problem lecture 30, 32 in CompEcon course
consumption-savings problem lecture 35 in CompEcon course
Whether choice space is discrete, continuous, mixed discrete-continuous or discretized#
Problems with discrete choice
deal or no deal problem, inventory management model lecture 27 in CompEcon course
Rust model of bus engine replacement lectures 28, 29 in CompEcon course
Problems with continuous choice
discretized: cake eating problem lecture 30 in CompEcon course , consumption-savings models lecture 35 in CompEcon course
treated as continuous: coming up next
require interpolating of value function in Bellman equation
Problems with discrete and continuous choice
much more complicated: kinks in value functions, discontinuous policy function
require global optimization in Bellman equation which is not easy
one way out is to discretize choices at the cost of reduced accuracy
see our paper Iskhakov et al. [2017] for how to smooth the kinks
What about state space?#
When choice is discrete, typically state space is also finite
Even when state variables are continuous, by discretization it is converted to discrete
This is true in general when using numerical solvers: state space is discretized within some reasonable bounds
choice of upper bounds, number and placement of grid points influence the (accuracy of the) solution
Another approach to represent state space is to project value and/or policy function onto space of orthogonal polynomials (Chebyshev polynomials in particular)
only works well when value function is sufficiently smooth
Whether time is continuous or discrete#
Discrete time
time periods \(t\), \(t+1\)
dynamics given by difference equations
Continuous time
all entities in the model are functions of time
dynamics given by differential equation
so, math is very different
continuous time for cleaner theoretical models, sometimes also solved numerically
not part of this course
Whether horizon is finite or infinite#
Finite horizon
there is terminal period \(T\)
special form of Bellman equation in period \(T\)
in other words, as if \(V(\text{at } T +1 ) = \mathbb{0}\)
value function and policy function are time dependent
solved by backwards induction with \(T\) number of steps
Infinite horizon
time subscripts are dropped, primes for next period values instead
solution is given by fixed point of the Bellman operator
have to actually solve a functional equation
Most problems can be specified and solved in both finite or infinite horizon
Whether model includes stochastic processes#
Deterministic models
No random elements, all motion rules deterministic
No need for expectation operator in Bellman equation
Stochastic models with idiosyncratic shocks
expectation does not have to be conditioned on current period shocks
solving the fixed point in expected value function space is beneficial
General form stochastic models
expectation in Bellman equation has to be computed with quadrature or Monte Carlo integration
Example: Inventory management model#
Consider the following problem in discrete time and finite horizon \(t=0,\dots,T\)
The notation is:
\(x_t\ge 0\) is inventory at period \(t\) measured in discrete units
\(d_t\ge 0\) is potentially stochastic demand at period \(t\)
\(q_t\ge 0\) is the order of new inventory
\(p\) is the profit per one unit of (supplied) good
\(c\) is the fixed cost of ordering any amount of new inventory
\(r\) is the cost of storing one unit of good
The sales in period \(t\) are given by \(s_t = \min\{x_t,d_t\}\).
Inventory to be stored till next period is given by \(k_t = \max\{x_t-d_t,0\} + q_t = x_{t+1}\).
The profit in period \(t\) is given by
Assuming all \(q_t \ge 0\), let \(\sigma = \{q_t\}_{t=1,\dots,T}\) denote a feasible inventory policy.
If \(d_t\) is stochastic the policy becomes a function of the period \(t\) inventory \(x_t\).
The expected profit maximizing problem is given by
where \(\beta\) is discount factor.
Bellman equation for the problem#
Decisions: \(q_t\), how much new inventory to order
What is important for the inventory decision at time period \(t\)?
instanteneous utility (profit) contains \(x_t\) and \(d_t\)
timing / sequence of events:
(beginning of period)
current inventory
demand
order (choice)
stored inventory
(end of period)
So, both \(x_t\) and \(d_t\) are taken into account for the new order to be made, forming the state space.
The expectation in the Bellman equation is taken over the distribution of the next period demand \(d_{t+1}\), which we assume is independent of any other variables and across time (idiosyncratic), thus the conditioning on \((x_t,d_t,s_t)\) can be meaningfully dropped.
Expectation can be written as an integral over the distribution of demand \(F(d)\), and since inventory is discrete it’s natural to assume demand is as well.
The integral then transforms into a sum over the possible value of demand, weighted by their probabilities \(pr(d)\)
But let’s focus first on a deterministic case: let \(d\) be fixed and constant over time. How does the Bellman equation change?
In the deterministic case with fixed \(d\), it can be simply dropped from the state space, and the Bellman equation can be simplified to
How does this convert to the code?
model=inventory_model(label='test')
print(model)
q=np.zeros(model.n)
print('Current profits with zero orders\n',model.profit(model.x,model.demand,q))
Inventory model labeled "test"
Paramters (c,p,r,β) = (3.2,2.5,0.5,0.95)
Demand=4
Upper bound on inventory 10
Current profits with zero orders
[ 0. 2.5 5. 7.5 10. 9.5 9. 8.5 8. 7.5 7. ]
# illustration of broadcasting in the inventory model
q=model.x[:,np.newaxis] # column vector
print('Current inventory\n',model.x)
print('Current sales\n',model.sales(model.x,model.demand))
print('Current orders\n',q)
print('Next period inventory\n',model.next_x(model.x,model.demand,q))
print('Current profits\n',model.profit(model.x,model.demand,q))
Current inventory
[ 0 1 2 3 4 5 6 7 8 9 10]
Current sales
[0 1 2 3 4 4 4 4 4 4 4]
Current orders
[[ 0]
[ 1]
[ 2]
[ 3]
[ 4]
[ 5]
[ 6]
[ 7]
[ 8]
[ 9]
[10]]
Next period inventory
[[ 0 0 0 0 0 1 2 3 4 5 6]
[ 1 1 1 1 1 2 3 4 5 6 7]
[ 2 2 2 2 2 3 4 5 6 7 8]
[ 3 3 3 3 3 4 5 6 7 8 9]
[ 4 4 4 4 4 5 6 7 8 9 10]
[ 5 5 5 5 5 6 7 8 9 10 11]
[ 6 6 6 6 6 7 8 9 10 11 12]
[ 7 7 7 7 7 8 9 10 11 12 13]
[ 8 8 8 8 8 9 10 11 12 13 14]
[ 9 9 9 9 9 10 11 12 13 14 15]
[10 10 10 10 10 11 12 13 14 15 16]]
Current profits
[[ 0. 2.5 5. 7.5 10. 9.5 9. 8.5 8. 7.5 7. ]
[-3.7 -1.2 1.3 3.8 6.3 5.8 5.3 4.8 4.3 3.8 3.3]
[-4.2 -1.7 0.8 3.3 5.8 5.3 4.8 4.3 3.8 3.3 2.8]
[-4.7 -2.2 0.3 2.8 5.3 4.8 4.3 3.8 3.3 2.8 2.3]
[-5.2 -2.7 -0.2 2.3 4.8 4.3 3.8 3.3 2.8 2.3 1.8]
[-5.7 -3.2 -0.7 1.8 4.3 3.8 3.3 2.8 2.3 1.8 1.3]
[-6.2 -3.7 -1.2 1.3 3.8 3.3 2.8 2.3 1.8 1.3 0.8]
[-6.7 -4.2 -1.7 0.8 3.3 2.8 2.3 1.8 1.3 0.8 0.3]
[-7.2 -4.7 -2.2 0.3 2.8 2.3 1.8 1.3 0.8 0.3 -0.2]
[-7.7 -5.2 -2.7 -0.2 2.3 1.8 1.3 0.8 0.3 -0.2 -0.7]
[-8.2 -5.7 -3.2 -0.7 1.8 1.3 0.8 0.3 -0.2 -0.7 -1.2]]
Backwards induction#
Backwards induction algorithm is used to solve finite horizon models
Solver for the finite horizon dynamic programming problems
1. Start at t=T
1. Solve Bellman equation at t, record optimal choice
1. Decrease t unless t=1, and return to previous step.
As result, for all t=1,..,T have found the optimal choice (as a function of state)
First, we need to code up the Bellman equation
v = np.zeros(model.n)
for i in range(3):
v,q = bellman(model,v)
print('Value =',v,'Policy =',q,sep='\n',end='\n\n')
Value =
[ 0. 2.5 5. 7.5 10. 9.5 9. 8.5 8. 7.5 7. ]
Policy =
[0 0 0 0 0 0 0 0 0 0 0]
Value =
[ 4.3 6.8 9.3 11.8 14.3 14.3 14.3 15.625 17.5 16.525
15.55 ]
Policy =
[4 4 4 4 4 3 2 0 0 0 0]
Value =
[ 9.425 11.925 14.425 16.925 19.425 19.425 19.425 19.71 21.585 21.085
20.585]
Policy =
[8 8 8 8 8 7 6 0 0 0 0]
Time period 5
[[ 0. 0. 0. 0. 0. ]
[ 0. 0. 0. 0. 2.5]
[ 0. 0. 0. 0. 5. ]
[ 0. 0. 0. 0. 7.5]
[ 0. 0. 0. 0. 10. ]
[ 0. 0. 0. 0. 9.5]
[ 0. 0. 0. 0. 9. ]
[ 0. 0. 0. 0. 8.5]
[ 0. 0. 0. 0. 8. ]
[ 0. 0. 0. 0. 7.5]
[ 0. 0. 0. 0. 7. ]]
Time period 4
[[ 0. 0. 0. 4.3 0. ]
[ 0. 0. 0. 6.8 2.5 ]
[ 0. 0. 0. 9.3 5. ]
[ 0. 0. 0. 11.8 7.5 ]
[ 0. 0. 0. 14.3 10. ]
[ 0. 0. 0. 14.3 9.5 ]
[ 0. 0. 0. 14.3 9. ]
[ 0. 0. 0. 15.625 8.5 ]
[ 0. 0. 0. 17.5 8. ]
[ 0. 0. 0. 16.525 7.5 ]
[ 0. 0. 0. 15.55 7. ]]
Time period 3
[[ 0. 0. 9.425 4.3 0. ]
[ 0. 0. 11.925 6.8 2.5 ]
[ 0. 0. 14.425 9.3 5. ]
[ 0. 0. 16.925 11.8 7.5 ]
[ 0. 0. 19.425 14.3 10. ]
[ 0. 0. 19.425 14.3 9.5 ]
[ 0. 0. 19.425 14.3 9. ]
[ 0. 0. 19.71 15.625 8.5 ]
[ 0. 0. 21.585 17.5 8. ]
[ 0. 0. 21.085 16.525 7.5 ]
[ 0. 0. 20.585 15.55 7. ]]
Time period 2
[[ 0. 13.30575 9.425 4.3 0. ]
[ 0. 15.80575 11.925 6.8 2.5 ]
[ 0. 18.30575 14.425 9.3 5. ]
[ 0. 20.80575 16.925 11.8 7.5 ]
[ 0. 23.30575 19.425 14.3 10. ]
[ 0. 23.30575 19.425 14.3 9.5 ]
[ 0. 23.30575 19.425 14.3 9. ]
[ 0. 24.57875 19.71 15.625 8.5 ]
[ 0. 26.45375 21.585 17.5 8. ]
[ 0. 25.95375 21.085 16.525 7.5 ]
[ 0. 25.45375 20.585 15.55 7. ]]
Time period 1
[[17.9310625 13.30575 9.425 4.3 0. ]
[20.4310625 15.80575 11.925 6.8 2.5 ]
[22.9310625 18.30575 14.425 9.3 5. ]
[25.4310625 20.80575 16.925 11.8 7.5 ]
[27.9310625 23.30575 19.425 14.3 10. ]
[27.9310625 23.30575 19.425 14.3 9.5 ]
[27.9310625 23.30575 19.425 14.3 9. ]
[28.2654625 24.57875 19.71 15.625 8.5 ]
[30.1404625 26.45375 21.585 17.5 8. ]
[29.6404625 25.95375 21.085 16.525 7.5 ]
[29.1404625 25.45375 20.585 15.55 7. ]]
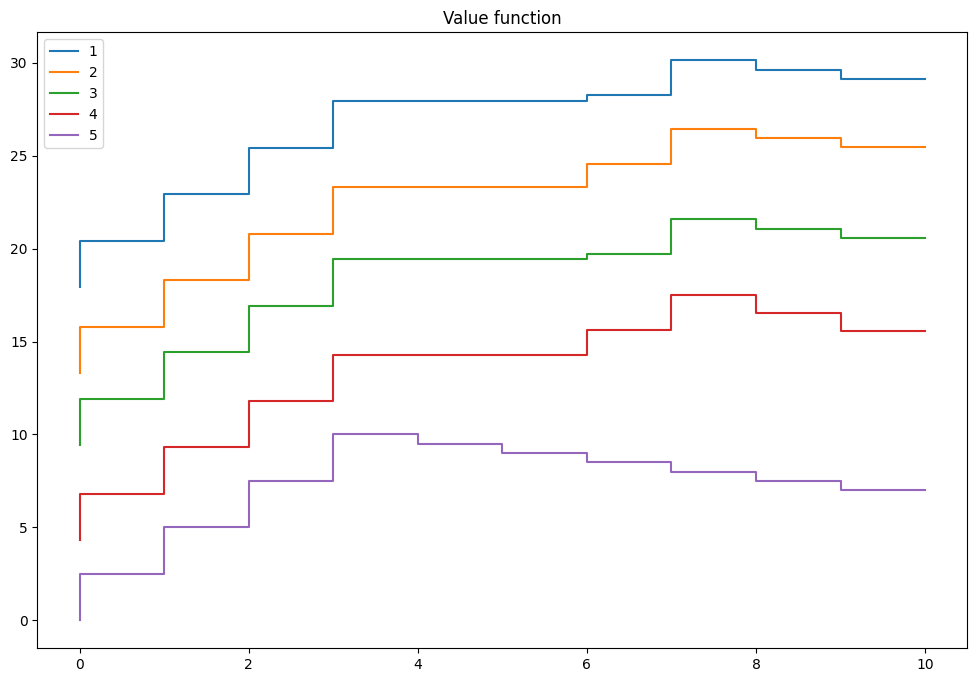
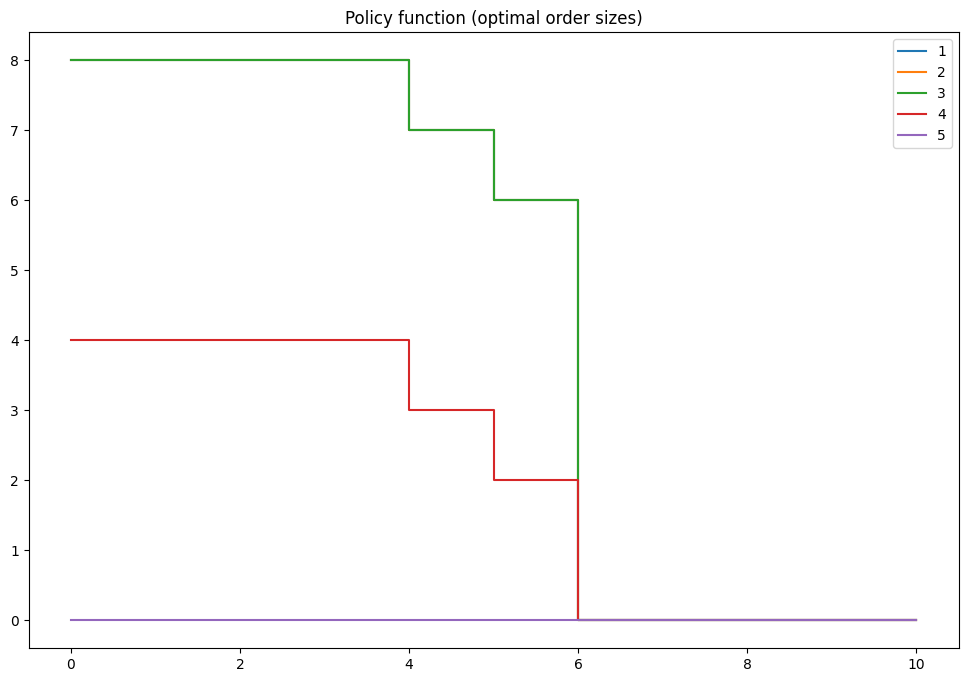
Optimal policy:
[[8. 8. 8. 4. 0.]
[8. 8. 8. 4. 0.]
[8. 8. 8. 4. 0.]
[8. 8. 8. 4. 0.]
[8. 8. 8. 4. 0.]
[7. 7. 7. 3. 0.]
[6. 6. 6. 2. 0.]
[0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0.]]
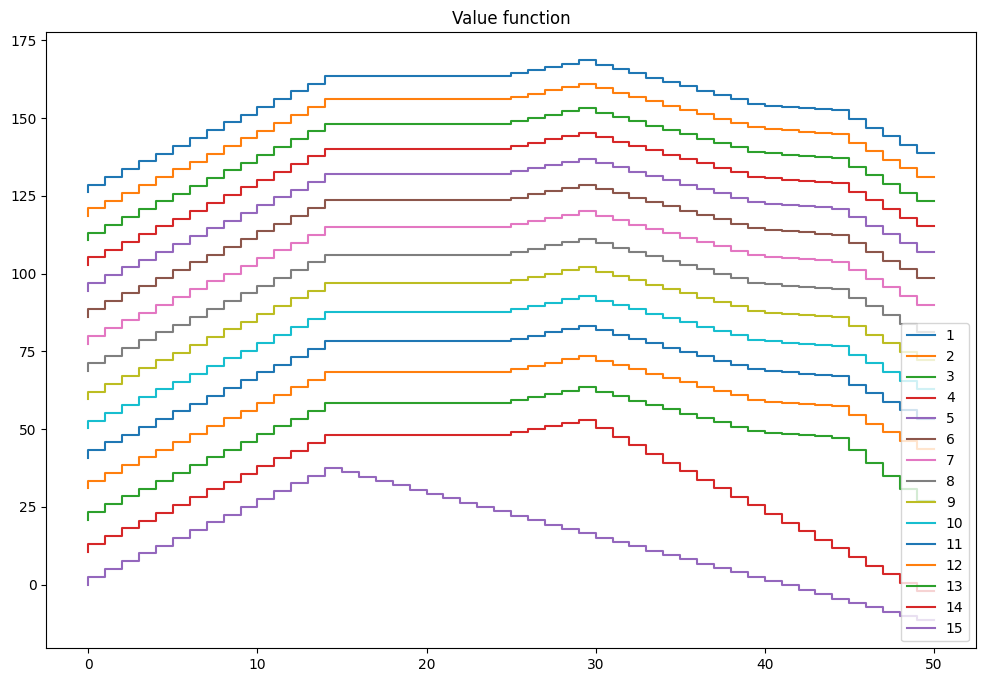
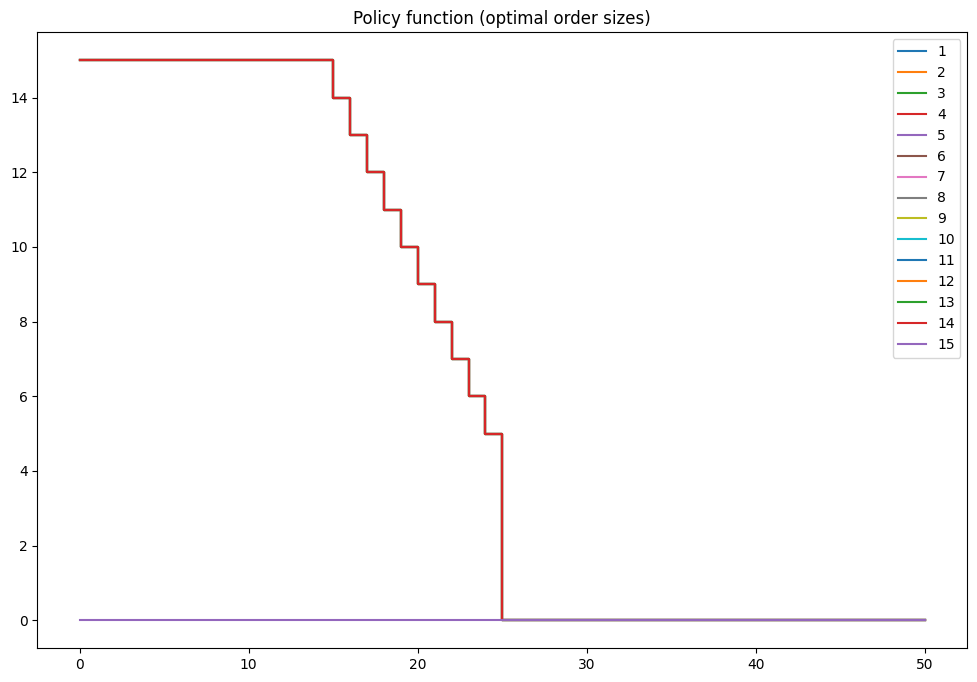
mod = inventory_model(label='production',max_inventory=50)
mod.demand = 15
mod.c = 5
mod.p = 2.5
mod.r = 1.4
mod.β = 0.975
mod = solver_backwards_induction(mod,T=15)
plot_solution(mod)
Contraction mappings and fixed points#
Solution of a dynamic model in infinite horizon is the solution to the Bellman euqation which is an actual equation in function space
We rely on contraction properties of the Bellman operator to find the fixed point that in order to solve infinite horizon dynamic models
Definition
Let
\( (S,\rho) \) be a complete metric space
\( T: S \rightarrow S \) denote an operator mapping \( S \) to itself
\( T \) is called a contraction on \( S \) with modulus \( \lambda \) if \( 0 \le \lambda < 1 \) and
Contraction mapping brings points in its domain “closer” to each other!
Example of contraction
interest rate \(r\)
What is the value of the annuity \(V\)?
Assuming \(\beta<1\)
But we can also reformulate recursively (as “Bellman equation” without choice)
contraction mapping under Euclidean norm!
modulus \(\beta\)
Successive approximations to find the value of annuity
Start with a guess \(V_0\)
Insert into the “Bellman equation”
Repeat until convergence
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
class annuity():
def __init__(self,c=1,beta=.9):
self.c = c # Annual payment
self.beta = beta # Discount factor
self.analytic = c/(1-beta) # compute analytic solution right away
def bellman(self,V):
'''Bellman equation'''
return self.c + self.beta*V
def solve(self, maxiter = 1000, tol=1e-4, verbose=False):
'''Solves the model using successive approximations'''
if verbose: print('{:<4} {:>15} {:>15}'.format('Iter','Value','Error'))
V0=0
for i in range(maxiter):
V1=self.bellman(V0)
if verbose: print('{:<4d} {:>15.8f} {:>15.8f}'.format(i,V1,V1-self.analytic))
if abs(V1-V0) < tol:
break
V0=V1
else: # when i went up to maxiter
print('No convergence: maximum number of iterations achieved!')
return V1
a = annuity(c=10,beta=0.954)
print('Analytic solution is',a.analytic)
print('Numeric solution is ',a.solve())
Analytic solution is 217.3913043478259
Numeric solution is 217.38928066546833
a.solve(verbose=True)
Iter Value Error
0 10.00000000 -207.39130435
1 19.54000000 -197.85130435
2 28.64116000 -188.75014435
3 37.32366664 -180.06763771
4 45.60677797 -171.78452637
5 53.50886619 -163.88243816
6 61.04745834 -156.34384600
7 68.23927526 -149.15202909
8 75.10026860 -142.29103575
9 81.64565624 -135.74564811
10 87.88995605 -129.50134829
11 93.84701808 -123.54428627
12 99.53005524 -117.86124910
13 104.95167270 -112.43963164
14 110.12389576 -107.26740859
15 115.05819655 -102.33310779
16 119.76551951 -97.62578484
17 124.25630562 -93.13499873
18 128.54051556 -88.85078879
19 132.62765184 -84.76365251
20 136.52677986 -80.86452449
21 140.24654798 -77.14475636
22 143.79520678 -73.59609757
23 147.18062726 -70.21067708
24 150.41031841 -66.98098594
25 153.49144376 -63.89986058
26 156.43083735 -60.96046700
27 159.23501883 -58.15628552
28 161.91020797 -55.48109638
29 164.46233840 -52.92896595
30 166.89707083 -50.49423351
31 169.21980557 -48.17149877
32 171.43569452 -45.95560983
33 173.54965257 -43.84165178
34 175.56636855 -41.82493580
35 177.49031560 -39.90098875
36 179.32576108 -38.06554327
37 181.07677607 -36.31452828
38 182.74724437 -34.64405998
39 184.34087113 -33.05043322
40 185.86119106 -31.53011329
41 187.31157627 -30.07972808
42 188.69524376 -28.69606059
43 190.01526255 -27.37604180
44 191.27456047 -26.11674388
45 192.47593069 -24.91537366
46 193.62203788 -23.76926647
47 194.71542414 -22.67588021
48 195.75851463 -21.63278972
49 196.75362295 -20.63768140
50 197.70295630 -19.68834805
51 198.60862031 -18.78268404
52 199.47262377 -17.91868057
53 200.29688308 -17.09442127
54 201.08322646 -16.30807789
55 201.83339804 -15.55790631
56 202.54906173 -14.84224262
57 203.23180489 -14.15949946
58 203.88314187 -13.50816248
59 204.50451734 -12.88678701
60 205.09730954 -12.29399481
61 205.66283330 -11.72847104
62 206.20234297 -11.18896138
63 206.71703520 -10.67426915
64 207.20805158 -10.18325277
65 207.67648120 -9.71482314
66 208.12336307 -9.26794128
67 208.54968837 -8.84161598
68 208.95640270 -8.43490165
69 209.34440818 -8.04689617
70 209.71456540 -7.67673895
71 210.06769539 -7.32360895
72 210.40458141 -6.98672294
73 210.72597066 -6.66533369
74 211.03257601 -6.35872834
75 211.32507751 -6.06622683
76 211.60412395 -5.78718040
77 211.87033425 -5.52097010
78 212.12429887 -5.26700548
79 212.36658112 -5.02472322
80 212.59771839 -4.79358596
81 212.81822335 -4.57308100
82 213.02858507 -4.36271928
83 213.22927016 -4.16203419
84 213.42072373 -3.97058062
85 213.60337044 -3.78793391
86 213.77761540 -3.61368895
87 213.94384509 -3.44745926
88 214.10242822 -3.28887613
89 214.25371652 -3.13758783
90 214.39804556 -2.99325879
91 214.53573546 -2.85556888
92 214.66709163 -2.72421272
93 214.79240542 -2.59889893
94 214.91195477 -2.47934958
95 215.02600485 -2.36529950
96 215.13480863 -2.25649572
97 215.23860743 -2.15269692
98 215.33763149 -2.05367286
99 215.43210044 -1.95920391
100 215.52222382 -1.86908053
101 215.60820152 -1.78310283
102 215.69022425 -1.70108010
103 215.76847394 -1.62283041
104 215.84312414 -1.54818021
105 215.91434043 -1.47696392
106 215.98228077 -1.40902358
107 216.04709585 -1.34420850
108 216.10892944 -1.28237491
109 216.16791869 -1.22338566
110 216.22419443 -1.16710992
111 216.27788148 -1.11342286
112 216.32909894 -1.06220541
113 216.37796038 -1.01334396
114 216.42457421 -0.96673014
115 216.46904379 -0.92226055
116 216.51146778 -0.87983657
117 216.55194026 -0.83936409
118 216.59055101 -0.80075334
119 216.62738566 -0.76391869
120 216.66252592 -0.72877843
121 216.69604973 -0.69525462
122 216.72803144 -0.66327291
123 216.75854200 -0.63276235
124 216.78764906 -0.60365528
125 216.81541721 -0.57588714
126 216.84190802 -0.54939633
127 216.86718025 -0.52412410
128 216.89128996 -0.50001439
129 216.91429062 -0.47701373
130 216.93623325 -0.45507110
131 216.95716652 -0.43413783
132 216.97713686 -0.41416749
133 216.99618856 -0.39511578
134 217.01436389 -0.37694046
135 217.03170315 -0.35960120
136 217.04824481 -0.34305954
137 217.06402555 -0.32727880
138 217.07908037 -0.31222398
139 217.09344267 -0.29786167
140 217.10714431 -0.28416004
141 217.12021567 -0.27108868
142 217.13268575 -0.25861860
143 217.14458221 -0.24672214
144 217.15593142 -0.23537292
145 217.16675858 -0.22454577
146 217.17708768 -0.21421666
147 217.18694165 -0.20436270
148 217.19634234 -0.19496201
149 217.20531059 -0.18599376
150 217.21386630 -0.17743805
151 217.22202845 -0.16927590
152 217.22981514 -0.16148921
153 217.23724365 -0.15406070
154 217.24433044 -0.14697391
155 217.25109124 -0.14021311
156 217.25754104 -0.13376331
157 217.26369415 -0.12761019
158 217.26956422 -0.12174013
159 217.27516427 -0.11614008
160 217.28050671 -0.11079764
161 217.28560340 -0.10570095
162 217.29046565 -0.10083870
163 217.29510423 -0.09620012
164 217.29952943 -0.09177492
165 217.30375108 -0.08755327
166 217.30777853 -0.08352582
167 217.31162072 -0.07968363
168 217.31528616 -0.07601818
169 217.31878300 -0.07252135
170 217.32211898 -0.06918537
171 217.32530151 -0.06600284
172 217.32833764 -0.06296671
173 217.33123411 -0.06007024
174 217.33399734 -0.05730701
175 217.33663346 -0.05467089
176 217.33914832 -0.05215603
177 217.34154750 -0.04975685
178 217.34383631 -0.04746803
179 217.34601984 -0.04528450
180 217.34810293 -0.04320142
181 217.35009020 -0.04121415
182 217.35198605 -0.03931830
183 217.35379469 -0.03750966
184 217.35552013 -0.03578421
185 217.35716621 -0.03413814
186 217.35873656 -0.03256779
187 217.36023468 -0.03106967
188 217.36166388 -0.02964046
189 217.36302735 -0.02827700
190 217.36432809 -0.02697626
191 217.36556900 -0.02573535
192 217.36675282 -0.02455153
193 217.36788219 -0.02342216
194 217.36895961 -0.02234474
195 217.36998747 -0.02131688
196 217.37096805 -0.02033630
197 217.37190352 -0.01940083
198 217.37279595 -0.01850839
199 217.37364734 -0.01765701
200 217.37445956 -0.01684479
201 217.37523442 -0.01606993
202 217.37597364 -0.01533071
203 217.37667885 -0.01462550
204 217.37735162 -0.01395272
205 217.37799345 -0.01331090
206 217.37860575 -0.01269860
207 217.37918989 -0.01211446
208 217.37974715 -0.01155720
209 217.38027878 -0.01102557
210 217.38078596 -0.01051839
211 217.38126980 -0.01003454
212 217.38173139 -0.00957295
213 217.38217175 -0.00913260
214 217.38259185 -0.00871250
215 217.38299262 -0.00831172
216 217.38337496 -0.00792938
217 217.38373971 -0.00756463
218 217.38408769 -0.00721666
219 217.38441965 -0.00688469
220 217.38473635 -0.00656800
221 217.38503848 -0.00626587
222 217.38532671 -0.00597764
223 217.38560168 -0.00570267
224 217.38586400 -0.00544035
225 217.38611426 -0.00519009
226 217.38635300 -0.00495135
227 217.38658076 -0.00472358
228 217.38679805 -0.00450630
229 217.38700534 -0.00429901
230 217.38720309 -0.00410125
231 217.38739175 -0.00391260
232 217.38757173 -0.00373262
233 217.38774343 -0.00356092
234 217.38790723 -0.00339711
235 217.38806350 -0.00324085
236 217.38821258 -0.00309177
237 217.38835480 -0.00294955
238 217.38849048 -0.00281387
239 217.38861992 -0.00268443
240 217.38874340 -0.00256095
241 217.38886121 -0.00244314
242 217.38897359 -0.00233076
243 217.38908080 -0.00222354
244 217.38918309 -0.00212126
245 217.38928067 -0.00202368
217.38928066546833
Solving infinite horizon dynamic models#
Value function iterations = successive approximations on the Bellman operator \(\rightarrow\) to solve for the fixed point of Bellman operator
Policy iteration method = Howard’s policy improvement algorithm, iterative solution for the fixed point of Bellman operator
Newton-Kantorovich method = Newton solver for the fixed point of Bellman operator, mathematically identical to Howard’s iterations
Convergence of infinite horizon solution methods#
In infinite horizon all solution methods continue until convergence.
How can we be sure that the algorithm would terminate?
The answer is given by the theory of contraction mappings:
Bellman operator is generally a contraction mapping
Banach theorem guarantees uniqueness of the fixed point, and
Successive approximation solver is globally convergent (works with any starting point)
Banach contraction mapping theorem (fixed point theorem)
Let \((S,\rho)\) be a complete metric space with a contraction mapping \(T: S \rightarrow S\). Then
\(T\) admits a unique fixed-point \(V^{\star} \in S\), i.e. \(T(V^{\star}) = V^{\star}\).
\(V^{\star}\) can be found by repeated application of the operator \(T\), i.e. \(T^n(V) \rightarrow V^{\star}\) as \(n\rightarrow \infty\).
In other words, the fixed point can be found by successive approximations from any starting point \(\rightarrow\) VFI method follows
What about Bellman operator?#
Bellman operator \(T: U \rightarrow U\) from functional space \(U\) to itself
metric space \((U,d_{\infty})\) with uniform/infinity/sup norm (max abs distance between functions over their domain)
Blackwell sufficient conditions for contraction
Let \(X \subseteq \mathbb{R}^n\) and \(B(x)\) be the space of bounded functions \(f: X \rightarrow \mathbb{R}\) defined on \(X\). Suppose that \(T: B(X) \rightarrow B(X)\) is an operator satisfying the following conditions:
(monotonicity) For any \(f,g \in B(X)\) and \(f(x) \le g(x)\) for all \(x\in X\) implies \(T(f)(x) \le T(g)(x)\) for all \(x\in X\),
(discounting) There exists \(\beta \in (0,1)\) such that
Then \(T\) is a contraction mapping with modulus \(\beta\).
Monotonicity of Bellman equation follows trivially due to maximization in \(T(V)(x)\)
Discounting: satisfied by elementary argument when \(\beta<1\)
Under additional boundedness conditions, Bellman operator is a contraction mapping by Blackwell sufficient conditions
\(\Rightarrow\)
unique solution
VFI algorithm is globally convergent
does not depend on the numerical implementation of the Bellman operator
Why do we need other solution algorithms?#
Although VFI is guaranteed to find the solution, it may be very inefficient when modulus of contraction (discount factor \(\beta\)) is close to one.
Newton-based method converge quadratically, but are not globally convergent, have to be initialized at their domain of attraction
Polyalgorithm would be a good idea, see NFXP in the next lecture
Inventory dynamics problem with stochastic demand in infinite time#
The model is given by the Bellman equation
Dropping the time subscripts#
Because we’ll be solving the problem in infinite horizon, the time subscripts can be dropped, and we can just have current period variables \( x,d,q,s,k \), and next period variables denoted by prime, i.e. \( x' \)
The Bellman equation is then
Bellman equation in expected value function space#
Note that similar to the bus engine replacement model, the inventory model features random variable which distribution does not depend on the previous period variables (it is idiosyncratic).
In this case it is possible to reduce the dimensionality of the fixed point problem by rewriting the Bellman operator in expected value function terms.
where the expectation is taken over the distribution of the next period demand \( d' \). The conditioning on \( x,d,q \) can be dropped exactly because \( d' \) is idiosyncratic.
We can then write the Bellman equation as
Taking the expectation with respect to \( d \) on both sides, we get
By assumption the inventory is discrete, and so it is natural to assume that the demand is also represented as a discrete random variable. Then the expectation can be written as a sum weighted with the corresponding probabilities \( pr(d) \), as
This is functional equation in \( EV \) which is also a contraction mapping!
Origin of the term Dynamic Programming#
The 1950’s were not good years for mathematical research. We had a very interesting gentleman in Washington named Wilson. He was Secretary of Defence, and he actually had a pathological fear and hatred of the word “research”. I’m not using the term lightly; I’m using it precisely. His face would suffuse, he would turn red, and he would get violent if people used the term, research, in his presence. You can imagine how he felt, then, about the term, mathematical. Hence, I felt I had to do something to shield Wilson and the Air Force from the fact that I was really doing mathematics inside the RAND Corporation.
What title, what name, could I choose?
In the first place, I was interested in planning, in decision-making, in thinking. But planning, is not a good word for various reasons. I decided therefore to use the word, “programming”. I wanted to get across the idea that this was dynamic, this was multistage, this was time-varying.
I thought, let’s kill two birds with one stone. Let’s take a word which has an absolutely precise meaning, namely dynamic, in the classical physical sense. It also has a very interesting property as an adjective, and that is it’s impossible to use the word, dynamic, in the pejorative sense.
Thus, I thought dynamic programming was a good name. It was something not even a Congressman could object to. So I used it as an umbrella for my activities.
— 📖 Bellman’s autobiography “The Eye of the Hurricane”
References and Additional Resources
📖 Rust [2016] “Dynamic programming”, The New Palgrave Dictionary of Economics
📖 Adda and Cooper [2023], “Dynamic Economics: Quantitative Methods and Applications”, chapters 2 and 3
📖 Aguirregabiria and Mira [2010] “Dynamic discrete choice structural models: A survey”
Wiki: Bellman equation https://en.wikipedia.org/wiki/Bellman_equation
Computer science view on DP link
“Knowing When to Stop” by Theodore Hill, American Scientist link